 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
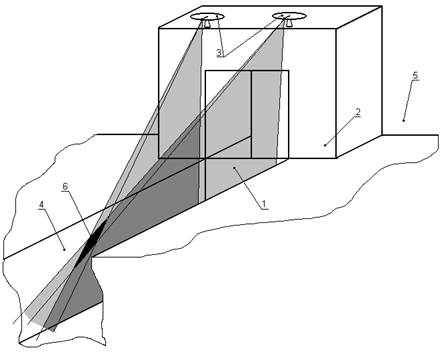
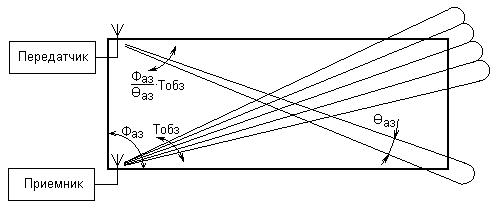
Реферат: Проектирование радиолокационной станции для обнаружения надводных целей в пределах речного шлюза Усть-Каменогорской гидроэлектростанцииДля наилучшего обзора всего шлюза приемную и передающую антенны лучше расположить у ворот входа или выхода шлюза, и на некотором возвышении, чтобы они не мешали проплывающему транспорту. Удобно разместить их на здании, в котором находятся установки по подъему ворот. Для лучшего разрешения по дальности необходимо достаточно большое расстояние (базис) между антеннами, однако, по понятным причинам, для полноценного обзора базис не должен превышать ширину шлюзовой камеры, которая составляет 18 м.
Рисунок 2.2 – Схема размещения антенн на речном шлюзе На рисунке 2.2 приведена схема размещения приемной и передающей антенн на шлюзе, где: 1 – ворота шлюза; 2 – здание-арка; 3 – приемная и передающая антенны; 4 – шлюзовая камера; 5 – водохранилище гидроэлектростанции; 6 – элемент разрешения РЛС. 3 ПРЕДВАРИТЕЛЬНЫЙ РАССЧЕТ3.1 Расчет основных тактико-технических РЛСПроизведем расчет основных тактико-технических характеристик проектируемой РЛС с учетом предъявляемых к ней требований и выполняемых функций. Длина волны и геометрические размеры антенны определяют ширину диаграммы направленности антенны РЛС. Для наиболее распространенных в настоящее время зеркальных антенн справедливо соотношение:
(2.1.1) где θ0,5 – ширина диаграммы направленности по половинной мощности; dа – размер раскрыва антенны в соответствующей плоскости; λ – длина волны. При заданном максимальном размере антенны реализовать значение ширины луча, требуемое для обеспечения желаемого разрешения, можно вариацией длины волны. Так как реальная разрешающая способность по угловой координате:
где γφ – коэффициент ухудшения потенциальной разрешающей способности, то для обеспечения требуемого разрешения длина волны с учетом (2.1.1) должна быть равна:
(2.1.2) Для большинства существующих радиолокационных станций значение γφ=1…1,5. Формула (2.1.2) определяет значение длины волны, при котором обеспечивается требуемая разрешающая способность по угловой координате.
Зададимся γφ=1,25, размер антенны dа=1,5м. и ширина диаграммы направленности в горизонтальной плоскости θE0,5=2˚ , тогда длина волны: Вертикальный размер антенны определяется шириной диаграммы направленности в вертикальной плоскости, которую выбираем исходя из необходимости облучать сразу всю зону обзора по дальности. Зона обзора по дальности есть длина шлюзовой камеры.
Так как длина шлюза составляет 100 м, а высота подвеса сканирующей антенны 15 м, то:
Уже зная длину волны и ширину диаграммы направленности в вертикальной плоскости, из формулы (2.1) найдем вертикальный размер антенны: На практике при определении длины волны РЛС, как правило, приходится исходить из требований, связанных с выбором энергетических показателей станции, определяющих дальность действия РЛС.
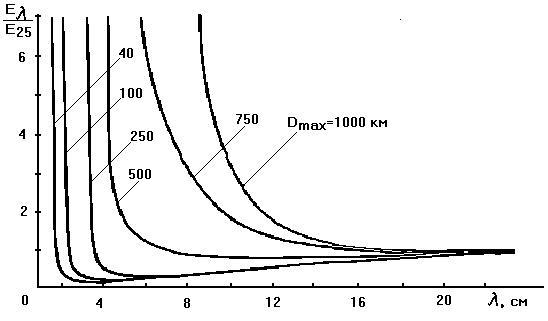
На рисунке 2.1.1 приведены графики, иллюстрирующие зависимость требуемой энергии передатчика от длины волны. При построения графиков энергия излучения на волне l=25 см (Е25) принималась за единицу и определялось отношение Еl/Е25 с учетом поглощения энергии в дожде интенсивностью 4 мм/ч и в кислороде на всей дальности действия. Из рисунка1 видно, что для каждой дальности действия Rmax существует оптимальное значение длины волны l при котором требуемая энергия излучаемых колебаний достигает минимума. Если длину волны брать больше оптимальной, то необходимая энергия излучения увеличивается относительно медленно, но при уменьшении длины волны по сравнению с l необходимая энергия излучения возрастает очень быстро. Рисунок 3.1 – Зависимость излучаемой энергии от длины волны Из рисунка видно, что длина волны λ=4 см находится правее минимальной энергии для необходимого расстояния и не требует больших энергетически затрат. Положение цели в зоне обзора будет находиться по двум азимутальным углам, определенным передающей и приемной сканирующей антенной, и базису – расстоянию между этими антеннами. Определим мощность излучения, необходимую для обнаружения целей с заданными вероятностями правильного обнаружения и ложной тревоги на требуемом расстоянии. Это не сложно сделать, воспользовавшись уравнением дальности для двухпозиционной системы [8]:
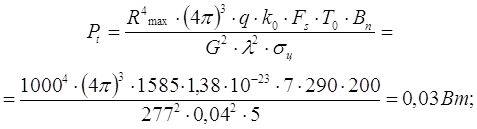
(2.1.3) где Pt –мощность передатчика РЛС; Rmax – максимальная дальность обнаружения целей; Gt – коэффициент направленного действия передающей антенны; Gr – коэффициент направленного действия приемной антенны; λ – длина волны; Pt – мощность отраженного от цели сигнала на входе приемника; σц – эффективная площадь рассеяния цели (по таблице 2.2 из [11] для лодки σц=5 м2). Рассчитаем недостающие составляющие в уравнение (2.1.3). Мощность отраженного от цели сигнала на входе приемника или пороговый сигнал обнаружения выразим через характеристики приемника:
где q – отношение сигнал/шум на входе приемника, необходимое для обнаружения целей с заданными вероятностями; k0 – постоянная Больцмана 1,38·10-23 Дж/К; Fs – коэффициент шума (для большинства приемников равен 6…9); T0 – температура окружающей среды 290 К; Вn – шумовая полоса пропускания преддетекторного фильтра приемника; Так как вероятность правильного обнаружения Рпо=0,95 и вероятность ложной тревоги Рлт=10-4, то по рис. 4.3 из [11] определяем отношение сигнал/шум q=32 дБ или q=1585. Зададимся шумовой полосой пропускания приемника, Вn=±100 Гц, так как скорость движения целей в шлюзе не превышает 2 м/с, то максимальный доплеровский сдвиг при длине волны l=0,04 м составит fд=100Гц.
Рассчитаем коэффициент направленного действия передающей и приемной антенны по формуле [9]:
где Sэф – эффективная площадь раскрыва антенны равная Sэф=0,25·π·l1· l2, l1 и l2 линейные размеры антенны. Таким образом, с учетом вышеприведенных соотношений, уравнение дальности примет вид:
Мощность передатчика составляет 30 мВт.
Радиолокационная система будет производить последовательное сканирование зоны обзора. Местоположение цели будет определяться по пересечению узконаправленных лучей диаграмм направленности приемной и передающей антенн. На каждый элемент разрешения передающей антенны приходится один период обзора приемной антенны (см. рис. 2.1.2). Рисунок 3.2 –Метод обзора шлюзовой камеры Чтобы определить период обновления информации зададимся периодом обзора приемной антенны. Пусть он равен Тобз. пр.=1 с, так как меньший период обзора сложно будет реализовать ввиду инерционных свойств антенны, а увеличение периода обзора негативно влияет на время обновления информации.
(3.4) где Фаз – зона обзора по азимуту; θаз – разрешающая способность по азимуту. Период обзора передающей антенны равен времени обновления информации на индикаторе. Из (2.1.4) следует что, время облучения цели равно Тобл.=1 с, а время наблюдения отраженного сигнала Тнаб.=1/45=0,022 с. Из произведенных расчетов видно, что тактико-технические характеристики не противоречат техническому заданию и сравнимы с параметрами аналогичных РЛС, рассмотренных в первой главе.
3.2 Расчет влияния отражений от поверхности воды Проектируемая радиолокационная станция осуществляет наблюдение за объектами внутри шлюза. При обзоре водной поверхности, поступающие на вход РЛС отраженные сигналы, несут информацию как о находящихся в зоне обзора объектах, так и о физических свойствах водной поверхности, что в данном случае является нежелательным фактором. Необходимо учитывать отражения от водной поверхности.
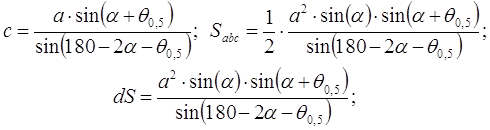
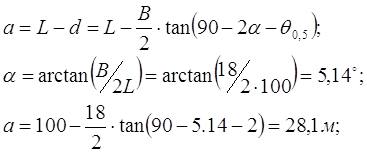
В данном разделе произведем анализ отражений радиолокационного сигнала от водной поверхности, для чего воспользуемся коэффициентом отражения γ0, значения, которые приведены в таблице 2.1 [9]. Для водной поверхности коэффициент отражения равен γ0= -40 дБ. Зная это можно определить удельную эффективную площадь рассеяния воды: где φн – угол обзора поверхности (в данном случае воды). Максимальный уровень помех в результате отражения радиолокационного сигнала от поверхности воды возникает при наибольшей эффективной площади рассеяния, то есть в случае наибольшей “освещаемой” поверхности или при наихудшей разрешающей способности. Рисунок 3.3 – Элемент обзора РЛС Найдем максимальную площадь водной поверхности, которая одновременно попадает под обзор радиолокационной станции, это происходит при обзоре наиболее удаленной части шлюзовой камеры. Площадь образуется в результате пересечения диаграмм направленности приемной и передающей антенны на противоположном краю шлюза (см. рис. 3.3).
Из рисунка видно, что площадь:
где из геометрических формул:
тогда:
где:
учитывая вышеизложенное:
И так, эффективная площадь рассеяния участка воды, площадь которого dS, составляет (угол обзора φн лежит в пределах 10…90˚, выбираем максимальное значение): Как видно, эффективная площадь рассеяния воды гораздо меньше эффективной площади рассеяния целей, которые необходимо обнаруживать. Следовательно, мощность, отраженного от водной поверхности, радиолокационного сигнала будет много меньше полезного сигнала. Проведя подобные же расчеты для стен шлюзовой камеры, коэффициент отражения γ0 для которых (для бетона γ0= -32 дБ) тоже очень мал, можно убедится, что эффективная площадь рассеяния целей гораздо больше ЭПР стен шлюза и отражения от них не повлияют работу радиолокационной станции.
Найдем из (2.1.3) мощности шумового сигнала на входе приемника:
Мощность полезного сигнала на входе приемника:
Зная значения мощностей шума и полезного сигнала на входе приемника можно найти их отношение и сравнить с требуемым. что удовлетворяет требованию к отношению сигнал/шум, которым мы задавались при предварительном расчете тактико-технических характеристик. Это говорит о том, что на фоне шумового сигнала, отраженного от водной поверхности, радиолокационная станция будет различать необходимые цели с заданными вероятностями правильного обнаружения и ложной тревоги. 4 РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ РЛС4.1 Разработка структурной схемы передатчика Произведем разработку структурной схемы радиолокационной станции с учетом требований к ее функциональным обязанностям. РЛС должна обнаруживать надводные цели с эффективной площадью рассеяния большей заданной и определять, в случае движущихся целей, их скорости и направление движения. Как было сказано ранее, радиолокационная станция работает в режиме непрерывного излучения. Передатчик РЛС излучает в пространство немодулированные колебания с частотой f0=7,5 ГГц и мощностью P=30 мВт. В передатчике осуществляется генерация заданной частоты и усиление. На такой большой частоте очень сложно реализовать генератор с необходимой стабильностью, поэтому необходимо генерировать меньшую частоту, а потом увеличивать её в умножителях частоты до нужного значения. Для стабилизации частоты наиболее целесообразно применить кварцевый резонатор (рисунок 4.1).
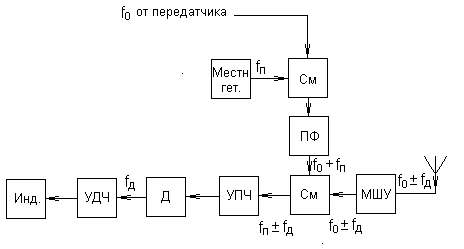
Чтобы избежать громоздкого многокаскадного умножителя, нужно генерировать как можно большую частоту в кварцевом автогенераторе. Их частота составляет порядка нескольких сотен мегагерц при использовании высших гармоник кварцевого резонатора. В данном случае выберем рабочую частоту генератора 150 МГц. Чтобы получить необходимую частоту излучения станции, требуется умножить колебания генератора в пятьдесят раз, для этого устанавливаются три последовательных каскада умножения частоты в 5, в 5 и в 2 раза. Затем полученные колебания усиливаются в усилительном каскаде до нужного уровня мощности. Рисунок 4.1 – Блок-схема передатчика РЛС После усиления необходимо отфильтровать полученный сигнал от высших гармоник, появившихся в результате работы нелинейного элемента (транзистора) в усилительном каскаде. Эту функцию выполняет выходная колебательная система, выполненная в виде фильтра низких частот. Кроме того, она обеспечивает согласование антенны с усилителем, то есть преобразовывает нагрузочное сопротивление антенны в эквивалентное сопротивление нагрузки оконечного каскада. С выходной колебательной системы готовый радиолокационный сигнал поступает в антенну и излучается в пространство. 4.2 Разработка структурной схемы приемника Приемный тракт проектируемой радиолокационной станции должен усилить принятые приемной антенной отраженные от цели сигналы, произвести их фильтрацию, при которой обеспечивается максимальное различение полезных эхо-сигналов и помех, и извлечь из него полезную информацию. Можно было бы реализовать супергетеродинный приемник с нулевой промежуточной частотой, функцию гетеродина в котором выполняет просачивающийся сигнал от передатчика, но такие приемники не достаточно чувствительны вследствие повышенного шума на низких промежуточных частотах, обусловленного так называемым фликкер-эффектом (мерцательный шум). Величину мерцательных шумов можно сделать небольшой по сравнению с нормальным шумом супергетеродинного приемника, используя достаточно большую промежуточную частоту, это объясняется обратно пропорциональной зависимостью мерцательных шумов от частоты Радиолокатор должен измерять скорости движения целей, что реализовывается на основе эффекта Доплера.
Рисунок 4.2 – Блок-схема простого доплеровского измерителя скорости На рисунке 4.2 приведена блок-схема приемника радиолокатора с непрерывным излучением, который работает на ненулевой промежуточной частоте. Вместо обычного местного гетеродина используется опорный сигнал, получаемый при смешении части сигнала передатчика и местного сигнала, частота которого равна промежуточной частоте приемника. Так как выходной сигнал смесителя состоит из двух боковых полос, расположенных по обе стороны от несущей, а так же более высоких гармоник, то в качестве опорного сигнала с помощью узкополосного фильтра выбираем верхнюю из боковых полос. В данной схеме стабильность частоты передатчика не влияет на работу приемника, так как отклонение частоты f0 компенсируется таким же отклонением опорной частоты, и промежуточная частота остается неизменной. Гораздо легче обеспечить стабильность частоты местного гетеродина, чем приемника, так как она гораздо меньше. Промежуточная частота fп=5 МГц. Однако подобный приемник определяет только модуль скорости и не может определить направление.
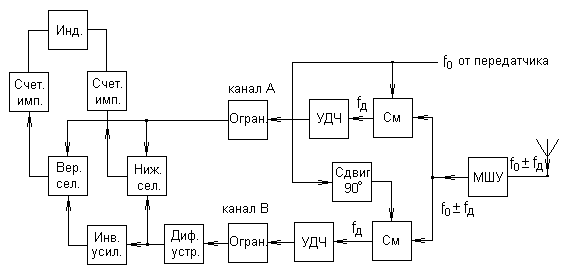
Рисунок 4.3 – Блок-схема приемника определения направления радиальной скорости и её значения. Страницы: 1, 2, 3, 4, 5, 6, 7, 8 |
Приглашения09.12.2013 - 16.12.2013 Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»09.12.2013 - 16.12.2013 Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»
|

 Таким образом, если Тобз. пр.=1 с, и за это время
передающая антенна должна “освещать” один элемент
разрешения по азимуту, то:
Таким образом, если Тобз. пр.=1 с, и за это время
передающая антенна должна “освещать” один элемент
разрешения по азимуту, то: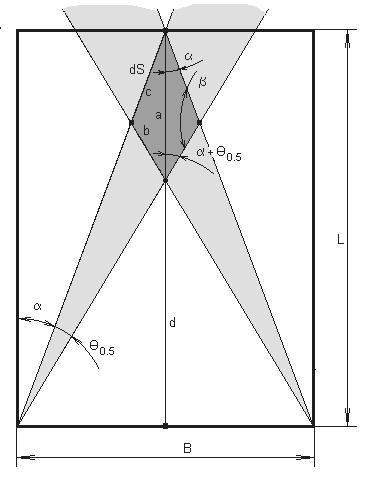








Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.