 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
Реферат: Проектирование цифровой следящей системы3.4.1. Исполнительный двигатель Передаточная функция исполнительного двигателя по углу поворота имеет вид (если пренебречь индуктивностью цепи якоря)
где Кд - коэффициент усиления двигателя, рад/В.с : Кд = wн / Uн ; Тд - электромеханическая постоянная времени:
В последней формуле a =1,2 - постоянный коэффициент; Jc - cуммарный момент инерции, приведенный к валу двигателя.
3.4.2. Электромашинный усилитель Передаточная функция ЭМУ
Кэму - коэффициент усиления ЭМУ по напряжению
Uэму - напряжение на выходе ЭМУ ; Uу - напряжение обмотки управления ЭМУ -
Ру, Rу - соответственно мощность и сопротивление обмотки управления ЭМУ, Ту, Ткз - постоянные времени обмотки управления и короткозамкнутой обмотки якоря ЭМУ. 3.4.3. Усилитель Усилитель (на функциональной схеме - У) служит для согласования выходного сигнала ЦАП с входным сопротивлением обмотки управления ЭМУ. Его можно считать безинерционным звеном с передаточной функцией Wу(Р) = Ку . В расчетах принять Ку = 1 .
3.4.4. Фазовый детектор Передаточная функция фазового детектора Wфд (P) = Кфд, где Кфд=1 - коэффициент усиления фазового детектора. 3.4.5. Измерительное устройство Передаточная функция измерительного устройства Wиу(Р)=Киу, где Киу=1 - коэффициент усиления измерительного устройства. Приложение 1 (продолжение)
Время регулирования tр: для студентов группы АТ-1 tp=2 c., АТ-2 tp=2,5 c., АТ-3 tp=3 c. Приложение 1 Варианты исходных данных для проектирования следящей
3.4.6. Редуктор Передаточная функция редуктора Wред(Р)=Кред=1/iр .
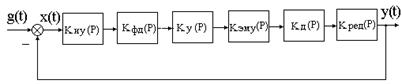
Структурная схема нескорректированной следящей системы представлена на рис.2.
Рис.2. Структурная схема нескорректированной следящей системы 3.5. Расчет последовательного непрерывного корректирующего звена методом ЛАЧХ
Построение логарифмической амплитудно-частотной характеристики (ЛАЧХ) последовательного корректирующего звена проводится в такой последовательности. 1. Строится ЛАЧХ заданной (нескорректированной) системы. 2. Строится желаемая ЛАЧХ по заданным показателям качества переходного процесса. 3. Строится ЛАЧХ последовательного корректирующего звена путем графического вычитания ЛАЧХ заданной системы из желаемой ЛАЧХ. 4. По виду ЛАЧХ корректирующего звена определяется его передаточная функция (непрерывная). 3.5.1. Построение ЛАЧХ заданной системы по виду передаточной функции Передаточную функцию разомкнутой системы нужно представить в виде произведения передаточных функций типовых динамических звеньев (ограничимся случаем, когда в системе отсутствуют колебательные звенья и звенья с запаздыванием). Например, пусть передаточная функция разомкнутой системы имеет вид:
Построение удобно проводить в такой последовательности. 1. Определить сопрягающие частоты wi=1/Тi и отложить их по оси абсцисс в логарифмическом масштабе (Тi - постоянные времени передаточной функции Кз(Р) ). 2. Отложить точку A1 с координатами wA1=1c-1 и L(wA1)=20lgКз ( см. рис. 3). Через точку A1 провести прямую с наклоном -20 дБ/дек. Построенная таким образом прямая линия совпадает с ЛАЧХ при частотах, меньших первой сопрягающей частоты (по порядку их расположения на оси частот слева направо). 3. На частоте сопряжения wi характеристика меняет свой наклон либо на +20 дБ/дек, если постоянная времени Тi=1/ wi находится в числителе исходной передаточной функции, либо на -20 дБ/дек, если постоянная времени Тi находится в знаменателе передаточной функции. Для исследования системы на устойчивость по амплитудно-фазовому критерию устойчивости с помощью логарифмических частотных характеристик необходимо кроме ЛАЧХ построить еще логарифмическую фазо-частотную характеристику (ЛФЧХ). По оси абсцисс откладывается частота в логарифмическом масштабе (используют ту же ось частот, что и для построения ЛАЧХ), а по оси ординат откладывают аргумент амплитудно-фазовой характеристики j(w) в градусах или в радианах в линейном масштабе. Для рассматриваемого примера j(w) рассчитывается по формуле j(w)= - 90 - arctgTу w - arctgTкзw - arctgTдw (гр.) . такту k моменты времени. Из последнего уравнения выразим U[k]: U[k]=(S0X[k-n]+S1X[k-n+1]+...+SmX[k-n+m] - (7) - G0U[k-n]-G1U[k-n+1]-. . .-Gn-1U[k-1])/Gn Уравнение (7) является рекуррентным уравнением, описывающим алгоритм работы цифрового корректирующего устройства. По нему должна быть составлена программа работы данного устройства. 3.10. Разработка принципиальной схемы цифровой На принципиальной схеме должны быть изображены сельсин-датчик и сельсин-трансформатор, фазовый детектор, АЦП, цифровой вычислитель, ЦАП, электронный усилитель мощности, ЭМУ, двигатель, редуктор. Проводить расчет электронных схем и изображать их развернутые принципиальные схемы не требуется. Л И Т Е Р А Т У Р А 1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1972. 766 с. 2. Батоврин А.А., Дашевский П.Г. и др. Цифровые следящие системы судовой автоматики. Л. : Судостроение, 1972. 445 с. Если в результате моделирования дискретной системы качество переходного процесса окажется хуже заданного, то нужно ввести в корректирующее звено изменения. Изменения нужно вносить в непрерывную передаточную функцию, пересчитывая ее затем в дискретную. При высокой колебательности процесса можно попробовать изменить в ту или иную сторону наименьшие постоянные времени знаменателя. В некоторых случаях дает хороший результат отбрасывание наименьших постоянных времени в числителе и знаменателе. 3.9. Получение рекуррентного уравнения цифрового корректирующего звена Пусть дискретная передаточная функция имеет вид (3). Уравнение (3) запишем следующим образом:
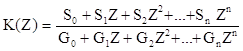
где U(Z) - Z-изображение выходной величины цифрового корректирующего устройства; X(Z) - Z-изображение входной величины корректирующего устройства. Перепишем уравнение (5), избавившись от знаменателя в левой и правой частях: U(Z)(G0+G1Z+...+GnZn)=X(Z)(S0+S1Z+...+SmZm) . (6) Раскрыв скобки, поделив левую и правую части уравнения на Zn и перейдя от изображений к оригиналам, получим: G0U[k-n]+G1U[k-n+1]+...+GnU[k]= =S0X[k-n]+S1X[k-n+1]+...+SmX[k-n+m] здесь X[k] , U[k] -
значения входной и выходной величин в произвольный такт времени k , X[k-1],
X[k-2] . . ., U[k-1], U[k-2] . . . - значения входной и выходной величин в
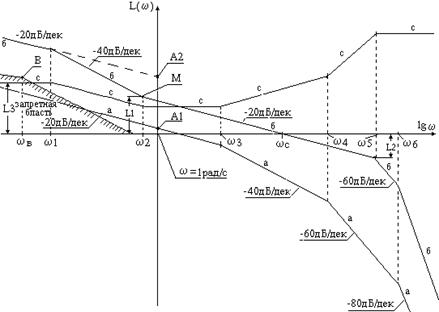
предшествующие 3.5.2. Построение желаемой ЛАЧХ При построении желаемой ЛАЧХ выделяют три области: область низких частот, область средних частот и область высоких частот. Вид ЛАЧХ в каждой из областей по разному влияет на качество системы. В области низких частот вид ЛАЧХ определяет точность работы системы в установившихся режимах. Область средних частот определяет динамические свойства системы (быстродействие, колебательность). Вид ЛАЧХ в области высоких частот практически мало влияет на качество системы. Построение желаемой ЛАЧХ удобно начинать с области средних частот в такой последовательности. По заданным величинам smax и tр определяем с помощью табл. 1 частоту среза wс . Например, пусть задано, что smax=30 % , tр=1,5 с. Из табл.1 для smax =30% определяем tрwс/p=3,2, откуда следует: wс= 3,2p/1,5=6,7 c-1 . Таблица 1
Наносим на ось абсцисс частоту среза wс и проводим через нее прямую линию с наклоном -20 дБ/дек (рис.3). Частота w2 , ограничивающая область средних частот желаемой
ЛАЧХ слева определяется величиной отрезка L1, которая может быть
найдена в зависимости от заданной величины smax из табл.1. Частота w3, ограничивающая область средних частот справа,
определяется величиной отрезка L2, при этом В области высоких частот желаемую ЛАЧХ нужно строить в виде прямолинейных отрезков с наклоном, кратным -20 дБ/дек. (т.е. -40, - 60, -80 и т.д.) , таким образом, чтобы разность характеристик желаемой и заданной в пределе при w ® ¥ составляла прямую линию, параллельную оси частот.
В области низких частот желаемая ЛАЧХ строится следующим образом. По заданной величине коэффициента усиления системы Кс=wоmax/xmax определяем величину LA2=20LgKc и отмечаем на чертеже точку A2 c координатами wA2=1 c-1 и LA2 (cм. рис.3). Через точку A2 проводим прямую линию с наклоном -20 дБ/дек. От точки М, ограничивающей область средних частот слева, проводим прямую линию с наклоном -40дБ/дек до пересечения с низкочастотной частью желаемой ЛАЧХ.
Рис.3. а-а-а . . . - ЛАЧХ заданной (неизменяемой части) системы; б-б-б . . . - ЛАЧХ желаемая; с-с-с . . . - ЛАЧХ последовательного корректирующего звена Порядок полинома знаменателя n должен быть не меньше порядка полинома числителя и не больше 5. В программу нужно ввести также период квантования по времени Т0. Как уже было сказано ранее, чем меньше Т0 , тем более дискретная система приближается по своим свойствам к непрерывной. Однако при слишком малых значениях Т0 процессор в реальной системе может не успевать выполнять все необходимые вычисления. Кроме того, при уменьшении Т0 увеличивается число шагов переходного процесса. Так как вычисления проводятся по рекуррентным формулам, неизбежные ошибки вычислений накапливаются от шага к шагу и при чрезмерно большом числе шагов ошибка вычислений может превысить допустимую величину (система может оказаться неустойчивой, либо с неудовлетворительным качеством переходного процесса). В силу сказанного, Т0 не должно быть слишком мало. Рекомендуется выбирать Т0 в пределах (0,1 - 0,01)/wc , где wс - частота среза скорректированной системы. 3.8. Моделирование цифровой следящей системы После того как дискретная передаточная функция определена можно приступить к моделированию цифровой следящей системы. Рекомендуется проводить моделирование, используя специализированные пакеты программ: MATLAB-simulink, либо ДИСПАС. В пакете MATLAB-simulink дискретное звено, также как и непрерывные звенья, набирается по коэффициентам передаточной функции. Никаких дополнительных элементов, учитывающих преобразование сигналов из непрерывных в дискретные и наоборот, вводить в модель не требуется. Все преобразования в системе производятся автоматически. В пакете ДИСПАС дискретное звено вводится тремя элементами: преобразователем непрерывный сигнал - код, вычислителем и преобразователем код - непрерывный сигнал. Вычислитель задается рекуррентным уравнением, которое нужно определить из дискретной передаточной функции (см. п.3.9). ДИСПАС позволяет моделировать дискретное звено, порядок которого не более 3. Если окажется , что показатели качества скорректированной системы хуже заданных, то нужно вносить в коррекцию соответствующие изменения. Так, если перерегулирование оказалось больше заданного, то нужно увеличивать отрезки L1 и L2. Если время регулирования оказалось больше заданного, то нужно увеличивать частоту среза желаемой ЛАЧХ. 3.7. Определение дискретной передаточной функции корректирующего звена Для получения дискретной передаточной функции звена по его непрерывной передаточной функции рекомендуется воспользоваться билинейным преобразованием. Для этого нужно в непрерывную передаточную функцию корректирующего звена сделать подстановку
Для проведения подобных расчетов можно воспользоваться программой (см. приложение 4), написанной на языке BASIC. Искомая передаточная функция в общем случае имеет вид:
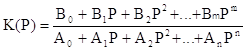
C помощью программы определяются коэффициенты Si и Gi передаточной функции (3). Непрерывная передаточная функция может быть задана либо в форме (2) постоянными времени числителя и знаменателя и коэффициентом усиления звена, либо в форме дробно-рациональной функции коэффициентами полиномов числителя и знаменателя:
Запретная область строится следующим образом. Отмечаем на чертеже точку В с координатами: От точки В вправо проводим прямую линию с наклоном Если ЛАЧХ, построенная по заданному коэффициенту Кс , попадает в запретную область, то это означает, что при данном коэффициенте Кс заданная точность слежения не может быть обеспечена и нужно его увеличить, т.е. поднять желаемую ЛАЧХ так, чтобы она не попадала в запретную область. По виду ЛАЧХ желаемой можно записать передаточную функцию непрерывной скорректированной (желаемой) системы. Для рассматриваемого примера (кривая б-б-б... рис.3) передаточная функция имеет вид:
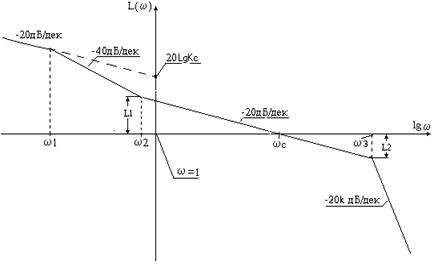
Для определения передаточной функции желаемой системы можно воспользоваться программой , приведенной в приложении 4. Программа написана на языке BASIC и позволяет найти постоянные времени T1, Т2, Т3 желаемой передаточной функции по показателям качества sm и tp. При этом передаточная функция записывается в виде Типовая желаемая ЛАЧХ, по которой записана передаточная функция (2), показана на рис. 4. Показатель степени k определяется наклоном заданной ЛАЧХ в области высоких частот.
Рис 4. Типовая ЛАЧХ желаемой следящей системы Для обеспечения заданных показателей качества переходного процесса скорректированная система должна обладать определенным запасом устойчивости по фазе. Необходимая величина запаса устойчивости по фазе (q) для заданной величины максимального перерегулирования указана в табл.1. После построения желаемой ЛАЧХ нужно рассчитать и построить ЛФЧХ скорректированной системы и определить q . 3.5.3. Расчет последовательного корректирующего звена ЛАЧХ последовательного непрерывного корректирующего звена строится путем графического вычитания из ЛАЧХ желаемой ЛАЧХ заданной части системы ( на рис.3 - линия с-с-с...). По виду ЛАЧХ нужно записать передаточную функцию
непрерывного последовательного корректирующего звена. Для ЛАЧХ
Коэффициент Ккор определяется из соотношения: 20lgКкор=L3 . Эту же передаточную функцию можно получить, если передаточную функцию желаемую Кж(Р) поделить на передаточную функцию заданной части системы Кз(Р). 3.6. Моделирование следящей системы с непрерывным последовательным корректирующим звеном Для того, чтобы убедиться, что
коррекция системы проведена правильно и скорректированная система имеет
показатели качества переходного процесса не хуже заданных, нужно провести
моделирование. Рекомендуется моделировать скорректированную систему на ПЭВМ,
используя специализированные пакеты программ ДИСПАС или |
 (3)
(3) (4)
(4)
 .
.
 (2)
(2)Приглашения
09.12.2013 - 16.12.2013
Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»
09.12.2013 - 16.12.2013
Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»

