 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
Дипломная работа: Методика проектування пристроїв синхронізації
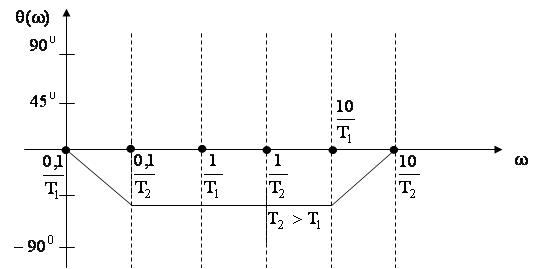
Фазова характеристика
Фазова характеристика, апроксимована відрізками
прямих ліній при зміні кутових частот, що лежать у діапазоні
Рис.4.1 Фазова характеристика. З рис.4.1 легко бачити, що ланка першого порядку
загального типу при відповідному підборі постійних часу Головні труднощі при реалізації розглянутого способу
одержання постійного часу випередження полягає в забезпеченні одержання лінійності
залежності у всьому діапазоні припустимих при синхронізації кутових частот З існуючих фазозсовуючих пристроїв більшою мірою задовольняють цій вимозі пристрої, що забезпечують фазове автопідстроювання частоти. При цьому потрібно, однак, мати на увазі, що властиво імпульсна фазова система автопідстроювання частоти реалізує залежність виду:
де всі позначення відповідають наведеній раніше,
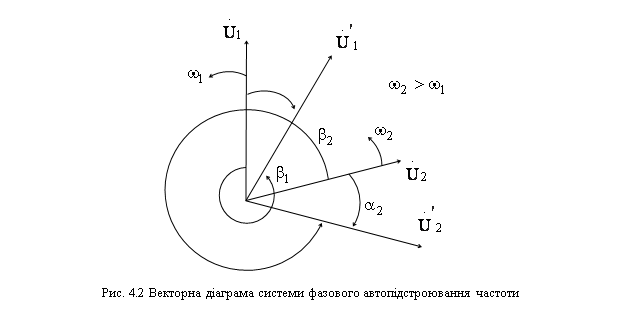
але фіксованій частоті Векторна діаграма для синхронізуємих
напруг
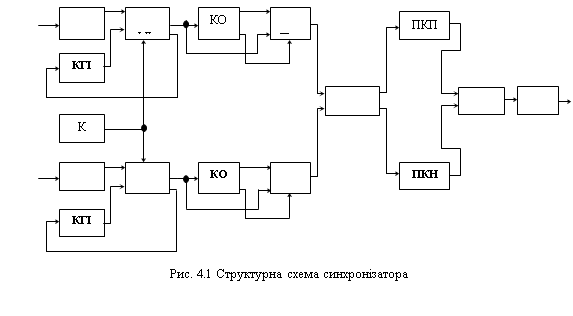
Із зіставлення рис.4.1 і рис.4.2 легко встановити, що система фазового автопідстроювання частоти зрушує убік відставання на більший кут напругу більшої частоти, у той час як на більший кут повинна зрушуватися напруга меншої частоти. Разом з тим, з рис.1.5 видно, що необхідний ефект досягається, якщо замість кутів Структурна схема синхронізатора, що реалізує запропонований спосіб одержання постійного часу випередження з використанням пристроїв імпульсного фазового автопідстроювання частоти, представлена на рис.4.1.1
ДФІ - дільник-формувач імпульсів; КГІ - керований генератор імпульсів; ІФД - імпульсний фазовий детектор; КО - комутатор операцій; ПП - пристрій переносу; ВІФД - вихідний імпульсний фазовий детектор; ПКПК (ПКНК) - пристрій контролю позитивного (негативно) ковзання; АБО - логічна схема “АБО”; КТ - ключ тиристорний; НГІ - настроєчний генератор імпульсів. Відповідно до запропонованого способу побудови постійного часу випередження синхронізатор має два канали, кожний з яких містить у собі пристрій імпульсного фазового автопідстроювання частоти і комутатор операцій із пристроєм переносу для переходу від кутів β1 і β2 до кутів α1 і α2. Пристрій імпульсного фазового автопідстроювання частоти кожного каналу складається з дільника-формувача імпульсів, керованого генератора імпульсів і імпульсного фазового детектора. Функції фіксації постійного часу випередження в момент збігу фаз зрушених напруг контролю величини ковзання й видачу команди в ланцюг керування вимикачем виконує вихідний вузол синхронізатора, що включає в себе допоміжний імпульсний фазовий детектор, пристрій контролю позитивного ковзання, пристрій контролю негативного ковзання, логічну схему “або” і тиристорний ключ. У дільниках формувачах імпульсів (ДФІ) синхронізуємі синусоїдальні напруги U1 і U2 з періодами T1 і T2 перетворяться в послідовності гострих імпульсів. Ці імпульси утворяться в момент проходження миттєвого значення напруги через нуль один раз за два періоди, тобто кожний імпульс є як би “міткою" початку періоду, відповідно рівного 2T1 і 2T2. Наприклад, якщо на вхід ДФІ надходить синусоїдальна напруга із частотою 50 Гц, то на виході ДФІ формуються імпульси із частотою 25 Гц. Розподіл частоти в ДФІ виробляється з метою розширення діапазону кутів випередження синхронізатора аж до 7200. Робота наступних вузлів синхронізатора відбувається
під впливом вихідних імпульсів ДФІ, тому будемо вести мову тільки про імпульсні
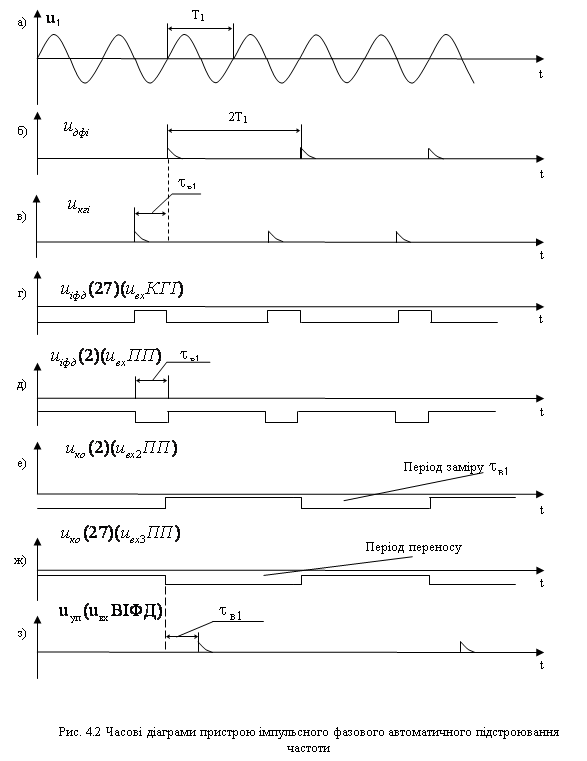
послідовності синхронізуємих напруг Керований генератор імпульсів (КГІ) являє собою автогенератор імпульсів позитивної полярності. Частота КГІ підбудовується під частоту ДФІ сигналами негативного зворотного зв'язку з виходу імпульсного фазового детектора. Імпульсний фазовий детектор (ІФД) - це тригер, на виході якого утворюються негативні прямокутні імпульси, тривалість яких визначається фазовими співвідношеннями імпульсів з виходу ДФІ й КГІ. Роботу ІФАПЧ досить розглянути на прикладі одного каналу; його тимчасові діаграми зображені на рис.4.2. Імпульсні послідовності від ДФІ й КГІ (рис.4.2 б, в) надходять на вхід ІФД, тривалість вихідних імпульсів якого визначається різницею фаз між імпульсами ДФІ й КГІ (рис.4.2 г, д). Вихідна імпульсна напруга ІФД через негативний зворотний зв'язок впливає на вхід КГІ, змінюючи його частоту так, щоб вона стала рівній частоті ДФІ. В принципі, пристрій ІФАПЧ може працювати в різних режимах. Наприклад, якщо частоти ДФІ й КГІ рівні, і ефект повільних змін параметрів керованого генератора, що визначають його частоту, у середньому повністю компенсується дією ІФАПЧ, пристрій працює в так званому режимі утримання. З поняттям режиму утримання нерозривно зв'язане поняття смуги утримання, тобто області початкових розстроювань, у якій можливий цей режим. Ширина смуги утримання визначається різницею граничних значень частоти КГІ, що відповідають найбільшим і найменшим середнім напругам на виході ІФД. Можливий і інший режим роботи пристрою, при якому в середньому різниця частот імпульсів ДФІ й КГІ дорівнює нулю, а різниця їхніх фаз періодично змінюється. Цей режим, використовуваний вкрай рідко, називається квазисинхронізмом. Звичайний пристрій проектують так, щоб він не виникав. Третій режим роботи пристрою ІФАПЧ - режим биттів. Його характерною рисою є безперервне наростання в середньому різниці фаз КГІ й ДФІ. Режим биттів завжди спостерігається в тих випадках, коли початкове розстроювання КГІ відносно ДФІ більше смуги утримання. Іноді він може мати місце й при початковому розстроюванні, меншої смуги утримання. У режимі биттів середнє значення частоти КГІ відрізняється від частоти ДФІ. У синхронізаторі використовується режим утримання. Перехідний стан системи, при якому режим биттів переходить із часом у режим утримання або квазисинхронізма, називається режимом захвату. Під смугою захвату розуміють область початкових розстроювань, у якій при будь-яких початкових умовах установлюється режим утримання або квазисинхронізма. Факт існування смуги захвату для ІФАПЧ кожного з каналів синхронізатора є визначальним при виборі припустимого діапазону зміни частот синхронізуємих напруг.
У синхронізаторі застосований КГІ, частота якого
лінійно залежить від величини середньої напруги на виході і ІФД, середнє значення
напруги на виході якого лінійно залежить від кута зрушення фаз між вхідними сигналами.
У силу цього, ІФАПЧ синхронізатора в режимі втримання забезпечує формування на виході
ІФД (рис.4.2 г) прямокутних імпульсів, відносна тривалість яких τ21
стосовно періоду 2T1 пропорційна частоті
де ДО1 - коефіцієнт пропорційності, що залежить від коефіцієнтів підсилення елементів ІФАПЧ: КГІ, ІФД, негативного зворотного зв'язку. Доповненням до періоду є часовий інтервал
На цей кут і необхідно зрушувати імпульсну послідовність
ДФІ убік відставання, причому для здійснення зрушення досить перенести інтервал
Задачу виміру кута Комутатор операцій (КО) виділяє один період для
виміру кута зсуву
Таким чином, на виходах пристроїв переносу в обох
каналах виходять імпульсні послідовності синхронізуємих напруг При рівності частот Контроль ковзання здійснюється за допомогою ПКПК і ПКЗК. Один вихід ВІФД підключений до ПКПК, а другий - до ПКЗК. Ці блоки здатні розрізняти знак ковзання, а при припустимому ковзанні - зафіксувати постійний час випередження в момент збігу фаз зрушених по фазі імпульсних послідовностей синхронізуємих напруг. Залежно від знака ковзання, у момент збігу фаз в ПКПК або ПКЗК формуються імпульси, що управляють через схему АБО тиристорний ключ (КТ), що, у свою чергу, управляє включенням вимикача. Настроєчний генератор імпульсів (НГІ) використається тільки при настроюванні синхронізатора. У формуванні вихідної команди при синхронізації НГІ не бере участь. 4.2 Вибір блоків принципової схемиУ процесі проведення досліджень була перевірена можливість реалізації запропонованих рішень. Для цього був зібраний пристрій синхронізації (макетний зразок). Розроблювальний синхронізатор призначається для забезпечення включення на паралельну роботу будь-яких типів синхронних генераторів як один з одним, так і з мережею. Обмеження на попередній режим роботи генераторів не накладаються. Синхронізатор може бути використаний у випадку застосування інерційних вимикачів із часом випередження, більшим 0,2с. У відомих синхронізаторів максимальний кут випередження завжди менше 360. Для такого кута випередження при постійному часі випередження, рівному 0,5с, максимальна частота ковзання, обумовлена з вираження (4.2.1) не перевищує 2Гц.
Ця умова не дозволяє застосовувати у випадку використання відомих технічних рішеннях технологію прискореного пуску й змушує обладнати регулятори швидкості пристроями припасування частоти. Розроблювальний синхронізатор розраховувався з умови, по якому величина кута випередження може досягати 720º, тобто з умови, що максимальна частота ковзання fsmax=4Гц. Синхронізатор призначений для роботи в системах електропостачання із частотою 50 Гц. При цьому можливий діапазон зміни частот синхронізуємих напруг дорівнює 48 - 52 Гц. Вхідні трансформатори синхронізатора обрані на напругу рівній 230 В. Припустимий діапазон зміни напруги перебуває в межах (0,8 - 1,2) Uном. У випадку включення на паралельну роботу високовольтних генераторів їхнє приєднання до синхронізатора повинне вироблятися через трансформатори напруги. Закінчення 1. Процес проектування синхронізатора можна представити як процес нагромадження знань про проектовану систему. 2. Інформаційна модель процесу проектування може бути відображена у вигляді розгалуженого графа, вершини якого являють собою знання про створювану систему на даному етапі проекту. Дуги графа інтерпретуються як способи обробки знань. 3. Процес проектування синхронізатора може бути представлений у вигляді ряду фрагментів, частина з яких повинна бути доручена людині, а інша частина комп'ютеру. 4. Людина в процесі проектування формулює мету й завдання проектування. Вона також повинна запропонувати критерії, по яких варто приймати рішення. Комп'ютер повинен проводити оцінку складних ситуацій, використовуючи для цього запропоновані вирішальні правила. 5. При розробці пристроїв автоматичної точної синхронізації варто виходити з того, що при вимірі кутової частоти ковзання й кута між синхронізуємими напругами непрямий метод виміру, заснований на використанні напруги биттів, дає більшу погрішність у порівнянні із прямим методом виміру. Непрямий метод виміру може бути застосований тільки у випадку використання вимикачів генератора з підвищеною швидкодією (tвкл≤0,05с) і тільки в системі електропостачання, електроприймачі яких не критичні до якості споживаної електроенергії. 6. Незважаючи на відносну складність, перевагу варто віддати синхронізаторам, у яких команда на включення вимикача генератора подається з постійним часом випередження. 7. Серед відомих способів одержання постійного часу випередження перевагу, виходячи з вимог точності й швидкодії, варто віддати способу, заснованому на зрушенні по фазі кожної із синхронізуємих напруг убік відставання на кут, пропорційний ковзанню цієї напруги стосовно частоти, загальної для обох генераторів і свідомо більшої кожної із цих частот. 8. Для зрушення по фазі синхронізуємих напруг доцільно використати системи імпульсного фазового автопідстроювання частоти, що працюють у режимі втримання. 9. У зв'язку з тим, що по пропонованому способі одержання постійного часу випередження ωi>ω0, для зрушення по фазі синхронізуємих напруг U1 і U2 варто використати не кути α1 і α2, отримані в системах фазового автопідстроювання частоти, а їхнє доповнення до 360˚. Література 1. В.Б. Толубко, Б.Т. Кононов, Б.Ф. Самойленко, М.І. Григоров, Електропостачання і електрообладнання військових об'єктів. Частина 2. МО України, 1998. 2. Системы управления электроснабжением и электроприводом, МО СССР, 1991. 3. Залесский А.М. Передача электрической энергии. - М. - Л.: Госэнергоиздат, 1948. - 355 с. 4. Правила устройства электроустановок. - М.: Энергоатомиздат, 1986. - 648 с. 5. Справочник по проектированию электроэнергетических систем/ В.В. Ершевич, А.Н. Зейлигер, ПА. Илларионов и др. - М.: Энергоатомиздат. - 1985. - 352 с. |
 .
.
 , (4.4)
, (4.4) (4.5)
(4.5)
 , (4.6)
, (4.6)Приглашения
09.12.2013 - 16.12.2013
Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»
09.12.2013 - 16.12.2013
Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»

