 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
Дипломная работа: Методика проектування пристроїв синхронізації2.2 Вибір способу виміру частоти ковзання Точність обробки постійного часу випередження визначається точністю виміру кута δ між синхронізуємими напругами й точністю виміру частоти ковзання ωs. У застосовуванні у цей час в пристроях синхронізації для виміру величини δ і ωs часто використовується так званий непрямий метод виміру, заснований на використанні огинаючої напруги биття Us (t). Миттєве значення напруги биття us (t) дорівнює різниці миттєвих значень синхронізуємих напруг u1 (t) і u2 (t):
У випадку, коли U1=U2=U, представимо (2.5) у вигляді:
Величина огинаючої напруги биття Us (t) визначається з (2.6) і дорівнює:
Використовуючи (2.7), можливо визначити як частоту
ковзання ωs, так і поточний кут зрушення фаз δ. Дійсно, інформацію
про величину ωs несе в собі час Ts між моментами проходження
через нуль огинаючих биттів. Визначивши період биттів Ts і обчисливши
величину
з якого видно, що по величині напруги биттів можна побічно судити про величину кута зрушення фаз. Однак непрямому методу виміру параметрів синхронізації ωs і δ властиві помилки, що особливо сильно проявляються тоді, коли U1≠U2, тобто тоді, коли огинання биттів через нуль не проходить, у зв'язку із чим важко визначити як період биттів Ts, так і встановити однозначний зв'язок між величинами δ і Us. Запропоновано для визначення параметрів синхронізації використати прямий метод виміру, заснований на вимірі часу між моментами проходження через нуль синхронізуємих напруг. Викладені основні способи формування команди на включення вимикача генератора, засновані на використанні прямого методу виміру. 3. Способи одержання постійного часу випередження 3.1 Кінцево-різнісний спосіб По цьому способі команду подають у момент часу, коли поточне значення кута зсуву фаз стає рівним розрахунковому значенню, тобто тоді, коли виконується наступна рівність:
Перейдемо від диференціального рівняння (3.1) до кінцево-різнісного рівняння:
де Увівши позначення
З (3.3) видно, що якщо сформувати команду в момент
часу, коли поточне значення кута
то тим самим буде отриманий постійний час випередження. 3.2 Часовий спосіб одержання постійного часу випередженняПо цьому способі порівнюють між собою тривалості
У системі відліку імпульсів великої частоти
Кутова частота ковзання
Час випередження визначається в такий спосіб:
Для формування команди часом випередження
Відповідно до умови для одержання постійного часу
випередження необхідно послідовно визначати тривалість відрізків Якщо після закінчення часу Постійний час випередження можна одержати, формуючи в момент переходу через нуль синусоїдальних напруг керуючі, основні й допоміжні імпульси (рис.3.8).
Рис.3.3.1 Імпульсний спосіб одержання постійного часу випередження. Керуючі імпульси 1, 1́ прив'язані по фазі до нуля синусоїди, основні імпульси 2, 2́ своїм переднім фронтом прив'язані до
переднього фронту керуючих імпульсів, а допоміжні імпульси 3, 3́ своїм переднім фронтом прив'язані до
заднього фронту основних імпульсів 2, 2́.
Основні й допоміжні імпульси мають однакову тривалість
У процесі синхронізації значення
Умова на виконання синхронізації
Постійний час випередження відпрацьовується в момент чергового збігу імпульсів 1́ і 2 за умови, що число попередніх збігів дорівнює:
Умова (3.4) означає, що від моменту подачі команди
до моменту збігу імпульсів 1́ і
1 залишилося постійне число збігів
У синхронізаторі при збігу імпульсів 1́ і 3 визначають число збігів Постійний час випередження спрацьовує в момент
завершення зчитування залишку По цьому способі зрівнюються поточні значення різниці фаз, представлені в дискретній формі й обмірювані протягом кожного періоду синхронізуємих напруг, зі збільшенням цієї різниці. Для визначення величини кута формуються імпульси, що запускають у момент переходу через нуль напруги меншої частоти й що скидають у момент переходу через нуль напруги більшої частоти. Тривалості імпульсів
Між моментами
Відрізки
 . (3.17) . (3.17)
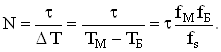
Рис.3.4.1 Дискретний спосіб формування постійного часу випередження Постійний час випередження спрацьовує, коли рівні
числа у двох лічильниках, один із яких заповнюється із частотою Порівнюючи число
Зіставляючи (3.4.3) і (3.4.4) знайдемо:
де Загальним для кінцево-різницевого, часового, імпульсного й дискретного способів одержання постійного часу випередження є необхідність виміру й порівняння один з одним наступних один за одним інтервалів часу (тривалості відрізків) через що можливий пропуск команди на включення вимикача. Це пов'язане з тим, що можливе таке чергування інтервалів часу, коли команду потрібно подавати не при порівнянні першого із другим, третього із четвертим, п'ятого із шостим і т.д., а при порівнянні другого із третім, четвертого з п'ятим, шостого із сьомим і т.д. Пропуск команди на включення вимикача генератора приводить до затягування процесу синхронізації, що особливо неприємно при малих кутових частотах ковзання. 3.5 Спосіб затримки і зсуву по фазі синхронізуємих напругВідзначених недоліків можна уникнути, якщо використати для формування команди на включення вимикача генератора спосіб, заснований на затримці й зсуву по фазі синхронізуємих напруг. За цим способом необхідно затримати імпульси з
меншою частотою проходження на два значення часу, одне із яких більше іншого у два
рази. У момент збігу затриманих імпульсів з імпульсами більшої частоти необхідно
сформувати нові імпульсні послідовності, перша з яких затримується на час спрацьовування
вимикача генератора, а друга - на час, обумовлений обмірюваним часом між затриманими першими й другими,
сформованими імпульсами меншої частоти. Затримкою імпульсів на два значення часу
досягається їхнє зрушення по фазі убік відставання на кути
Затримка імпульсу, одержуваного в момент збігу
імпульсних послідовностей напруги більшої частоти й напруги меншої частоти, зрушеного
по фазі на кут У синхронізаторі виробляється вимір відрізка часу
між моментом формування імпульсу, затриманого на час
Команда на включення подається після моменту збігу
імпульсів більшої частоти й зрушених на кут
З умови роботи синхронізатора ясно, що
Вираз (3.23) визначає правило вибору тимчасової
затримки знизу. У зв'язку з тим, що величина кута Ця нерівність визначає правило вибору тимчасової
затримки зверху. Границя зверху обмежує можливий діапазон кутів включення, а значить
і можливих значень
Основний недолік цього способу полягає в складності його схемної реалізації. Більш простим у реалізації є спосіб, по якому команду на включення вимикача генератора варто подати в момент збігу напруги більшої частоти зі зрушеним по фазі убік відставання напругою меншої частоти. Підвищити точність відпрацьовування постійного часу випередження можливо, зсовуючи кожну із синхронізуємих напруг убік відставання на кут, пропорційний ковзанню даної напруги стосовно фіксованої частоти, загальної для обох напруг і свідомо більшої частоти кожного з них. Кут зрушення фази напруги меншої частоти Команда на включення вимикача генератора подається
в момент збігу по фазі напруг
Час відпрацьовування цього кута постійний й дорівнює часу випередження:
Результати проведеного аналізу дають підстави зробити висновок про те, що найбільш кращим варто вважати спосіб формування команди на включення вимикача генератора, заснований на зсуву по фазі убік відставання обох синхронізуємих напруг. 4. Вибір структурної схеми синхронізатора Практична реалізація розглянутого способу одержання постійного часу випередження можлива у випадку використання в якості фазозсовуючих пристроїв динамічних ланок першого порядку загального типу, диференціальні рівняння яких мають такий вигляд:
де
|
Приглашения09.12.2013 - 16.12.2013 Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»09.12.2013 - 16.12.2013 Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»
|
 . (3.1)
. (3.1) , (3.2)
, (3.2) запишемо (3.2) у вигляді:
запишемо (3.2) у вигляді: (3.4)
(3.4)
 . (3.5)
. (3.5) (3.6)
(3.6) (3.7)
(3.7) . (3.8)
. (3.8) раз більшої, ніж частота запису.
раз більшої, ніж частота запису.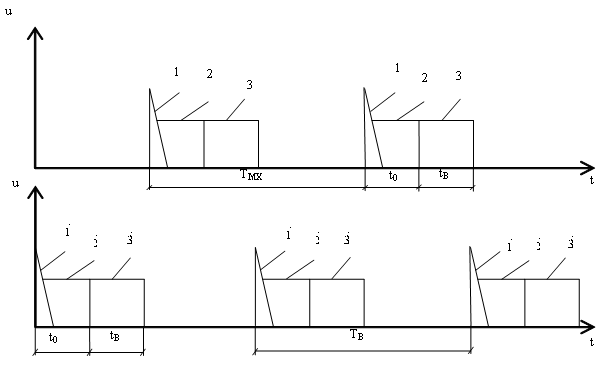
 (3.9)
(3.9) (3.10)
(3.10) (3.12)
(3.12) (3.14)
(3.14)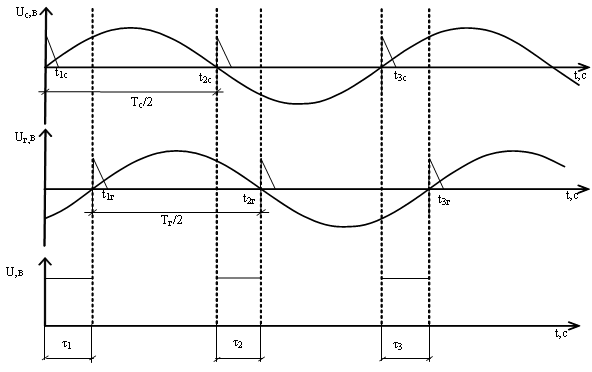
 . (3.18)
. (3.18) (3.19)
(3.19) - практично постійний коефіцієнт,
величина якого може бути обрана рівній часу випередження.
- практично постійний коефіцієнт,
величина якого може бути обрана рівній часу випередження. ,
,  . (3.20)
. (3.20) и.
и.  (3.23)
(3.23)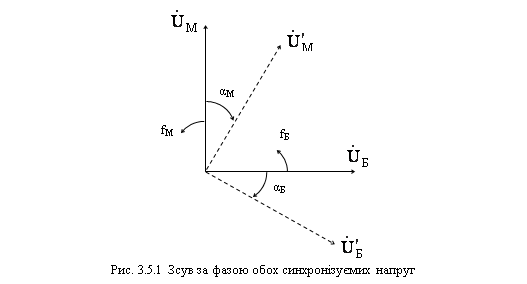
 (3.26)
(3.26)

Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.