 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
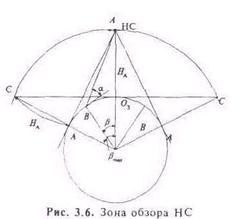
Реферат: Спутниковая система ГЛОНАСССинхронизация различных процессов в СРНС обеспечивается с помощью высокостабильного (атомного) системного эталона времени и частоты, который используется, в частности, в процессе юстировки бортовых эталонов времени и частоты навигационных спутников СРНС. 2.3. Навигационная аппаратура потребителей СРНС Приемоиндикаторы СРНС, состоящие из радиоприемника и вычислителя, предназначены для приема и обработки навигационных сигналов спутников с целью определения необходимой потребителям информации (пространственно-временных координат, направления и скорости, пространственной ориентации и т. п.). Пространственное положение потребителя обычно определяется в приемоиндикаторе в два этапа: сначала определяются текущие координаты спутников и первичные навигационные параметры (дальность, ее производные и др.) относительно соответствующих НС, а затем рассчитываются вторичные — географическая широта, долгота, высота потребителя и т. д. Сравнение текущих координат потребителей с координатами выбранных навигационных точек (точек маршрута, реперов и т. п.) позволяет сформировать в ПИ сигналы для управления различными транспортными средствами. Вектор скорости потребителя вычисляют путем обработки результатов измерений доплеровских сдвигов частоты сигналов НС с учетом известного вектора скорости спутника. Для нахождения пространственной ориентации потребителя в приемоиндикаторе СРНС осуществляются разностные измерения с использованием специальных антенных решеток. 2.4. Взаимодействие подсистем СРНС в процессе определения текущих координат спутников Способ функционирования современных СРНС позволяет отнести их к радиомаячным навигационным средствам. Однако необходимость постоянного определения текущих координат НС и выбора из них видимых потребителю НС и рабочего созвездия исправных НС существенно отличает СРНС от традиционных радиомаячных РНС (РСБН, РСДН), в которых координаты радиомаяков известны и постоянны. Непрерывное нахождение текущих координат НС, движущихся с большими изменяющимися но времени скоростями, представляет собой сложную задачу. Координаты НС могут быть определены в общем случае на КИК или непосредственно на спутнике (самоопределяющиеся НС). В настоящее время отдается предпочтение первому подходу. Это связано с тем, что существуют хорошо апробированные на практике методы и средства решения этой проблемы в наземных условиях. В современных СРНС управление НС осуществляется с ограниченных территорий и, следовательно, не обеспечивается постоянное взаимодействие КИК и сети НС. В связи с этим выделяют два этапа решения этой задачи. На первом этапе в аппаратуре КИК измеряют координаты спутников в процессе их пролета в зоне видимости и вычисляют параметры их орбит. Эти данные прогнозируются на фиксированные (опорные) моменты времени, например на середину каждого получасового интервала предстоящих суток, до выработки следующего прогноза. Спрогнозированные координаты НС и их производные (эфемериды) передаются на НС, а затем в виде навигационного (служебного) сообщения, соответствующего указанным моментам времени, потребителям. На втором этапе в аппаратуре потребителя по этим данным осуществляется последующее прогнозирование координат НС, т. е., вычисляются текущие координаты НС в интервалах между опорными точками траектории. Процедуры первичного и вторичного прогнозирования координат проводят при известных закономерностях движения НС. В отличие от самоопределяющихся НС, рассмотренный вариант функционирования СРНС обеспечивает упрощение аппаратуры спутников за счет усложнения структуры КИК с целью достижения заданной надежности. Заметим, что в навигационное сообщение НС КИК, кроме того, закладывает альманах — набор справочных сведений о всей сети НС, в том числе загрубленные эфемериды НС, которые обычно используются для определения видимых потребителю НС и выбора рабочего созвездия, обеспечивающего высокое качество НВО. Темп обновления точной эфемеридной информации (ЭИ) значительно выше, поэтому ее часто называют оперативной ЭИ в отличие от долговременной ЭИ в альманахе. 3. Основные навигационные характеристики НС К основным навигационным характеристикам НС относят зону обзора, зону видимости, продолжительность наблюдения, орбитальную конфигурацию сети НС и др. На чертеже (рис. 2) поясняются основные определения. Зона обзора НС представляет собой участок земной поверхности, на котором можно осуществлять наблюдение за НС, прием его сигналов. Центром зоны обзора является подспутниковая точка О3, называемая географическим местом спутника (ГМС). Координаты ГМС (географические широта и долгота) могут быть рассчитаны по формулам:
где
Бортовые приемоиндикаторы СРНС
обеспечивают заданную точность измерений в зоне обзора, ограниченной радиогоризонтом,
который поднят для пользователя на угол 5 ... 10° (угол маски). В этом случае зона обзора определяется
углом
Площадь зоны
обзора При увеличении
высоты НС до Рассмотренная выше зона обзора соответствует фиксированному моменту времени (мгновенная зона обзора). У нестационарных НС мгновенная зона
обзора, перемещаясь по поверхности Земли, образует зону обзора в виде полосы
шириной Установим
условия видимости НС для наблюдателя, расположенного в точке
НС наблюдается из точки
С учетом радиогоризонта угловой радиус зоны обзора
уменьшается Продолжительность сеанса связи с НС Для круговой орбиты
Для СРНС ГЛОНАСС
Очевидно, что если потребитель находится в стороне от трассы НС, то продолжительность наблюдения спутника уменьшается. Навигационные алгоритмы, реализованные в бортовых приемоиндикаторах современных СРНС, обычно ориентированы на прием сигналов от нескольких НС одновременно. Наблюдение в любой точке рабочей зоны СРНС одновременно нескольких НС обеспечивается путем оптимального выбора стабильной пространственно-временной структуры (конфигурации) сети НС — числа, ориентации и формы орбит; числа НС на каждой из них; взаимного расположения орбит и спутников на них. Обычно число НС в сети превышает минимально необходимое за счет резервных НС. 4. Решение навигационной задачи Основным содержанием навигационной
задачи (НЗ) в СРНС является определение пространственно-временных координат потребителя,
а также составляющих его скорости, поэтому в результате решения навигационной
задачи должен быть определен расширенный вектор состояния потребителя П,
который в инерциальной системе координат можно представить в виде Элементы вектора потребителя недоступны
непосредственному измерению с помощью радиосредств. У принятого радиосигнала
могут измеряться те или другие его параметры, например задержка или доплеровское
смещение частоты. Измеряемый в интересах навигации параметр радиосигнала
называют радионавигационным (РНП), а соответствующий ему геометрический
параметр — навигационным (НП), поэтому задержка сигнала t и его доплеровское смещение частоты
де с — скорость света; l — длина волны излучаемого НС сигнала. Геометрическое место точек пространства с одинаковым значением навигационного параметра называют поверхностью положения. Пересечение двух поверхностей положения определяет линию положения — геометрическое место точек пространства, имеющих два определенных значения двух навигационных параметров. Местоположение определяется координатами точки пересечения трех поверхностей положения или двух линий положения. В ряде случаев (из-за нелинейности) две линии положения могут пересекаться в двух точках. При этом однозначно найти местоположение можно, только используя дополнительную поверхность положения или иную информацию о местоположении объекта. Для решения навигационной задачи, т. с. для нахождения вектора потребителя П, используют функциональную связь между навигационными параметрами и компонентами вектора потребителя. Соответствующие функциональные зависимости принято называть навигационными функциями. Конкретный вид навигационных функций обусловлен многими факторами: видом НП, характером движения НС и потребителя, выбранной системой координат и т.д. Навигационные функции для пространственных координат потребителя можно определить с помощью различных разновидностей дальномерных, разностно-дальномерных, угломерных методов и их комбинаций. Для получения навигационных функций, включающих составляющие вектора скорости потребителя, используют радиально-скоростные методы. 5. СРНС ГЛОНАСС 5.1. Структура и основные характеристики Отечественная сетевая среднеорбитальная СРНС ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) предназначена для непрерывного и высокоточного определения пространственного (трехмерного) местоположения вектора скорости движения, а также времени космических, авиационных, морских и наземных потребителей в любой точке Земли или околоземного пространства. В настоящее время она состоит из трех подсистем: · подсистема космических аппаратов (ПКА), состоящая из навигационных спутников ГЛОНАСС на соответствующих орбитах; · подсистема контроля и управления (ПКУ), состоящая из наземных пунктов контроля и управления; · аппаратуры потребителей (АП). Навигационные определения в ГЛОНАСС осуществляются на основе опросных измерений в аппаратуре потребителей псевдодальности и радиальной псевдоскорости до четырех спутников (или трех спутников при использовании дополнительной информации) ГЛОНАСС, а также с учетом принятыx навигационных сообщений этих спутников. В навигационных сообщениях, передаваемых с помощью спутниковых радиосигналов, содержится информация о различных параметрах, в том числе и необходимые сведения о положении и движении спутников в соответствующие моменты времени. В результате обработки этих данных в АП ГЛОНАСС обычно определяются три (две) координаты потребителя, величина и направление вектора его земной (путевой) скорости, текущее время (местное или в шкале Госэталона Координированного Всемирного Времени UTC(SU) или, по другому, UТC(ГЭВЧ) (ГЭВЧ — Государственный эталон времени и частоты). Основные характеристики СРНС ГЛОНАСС приведены в табл. 1 — 2, где для сравнения приведены сведения об американской срсдневысотной СРНС GPS. В табл. 1 приведены общесистемные характеристики СРНС ГЛОНАСС. В табл. 2 приведены как стандартные значения характеристик СРНС, так и их оценки на основе данных, полученных в 1993—1995 гг. Последние показаны в скобках, причем для С/А-кода, кода стандартной точности) значения приводятся для вариантов работы с А/без SA (SA — Selective Availability — селективный доступ) ). Таблица 1. Системные характеристики СРНС ГЛОНАСС
5.2. Назначение и состав подсистемы контроля и управления Наземный сегмент системы ГЛОНАСС — подсистема контроля и упрощения (ПКУ), предназначена для контроля правильности функционирования правления и информационного обеспечения сети спутников системы ГЛОНАСС, состоит из следующих взаимосвязанных стационарных элементов: центр управления системой ГЛОНАСС (ЦУС); центральный синхронизатор (ЦС); контрольные станции (КС); система контроля фаз (СКФ); кванто-оптические станции (КОС); аппаратура контроля поля (АКП). Наземный сегмент выполняет следующие функции: · проведение траекторных измерений для определения и прогнозировании непрерывного уточнения параметров орбит всех спутников; · временные измерения для определения расхождения бортовых шкал времени всех спутников с системной шкалой времени ГЛОНАСС, синхронизации спутниковой шкалы времени с временной шкалой центрального синхронизатора и службы единого времени путем фазирования и коррекции бортовых шкал времени спутников; · формирование массива служебной информации (навигационных сообщений), содержащего спрогнозированные эфемериды, альманах и поправки к бортовой шкале времени каждого спутника и другие данные, необходимые для формирования навигационных кадров; · передача (закладка) массива служебной информации в память ЭВМ каждого спутника и контроль за его прохождением; · контроль по телеметрическим каналам за работой бортовых систем спутников и диагностика их состояния; · контроль информации в навигационных сообщениях спутника, прием сигнала вызова ПКУ; · управление полетом спутников и работой их бортовых систем путем выдачи на спутники временных программ и команд управления; контроль прохождения этих данных; контроль характеристик навигационного поля; · определение сдвига фазы дальномерного навигационного сигнала спутника по отношению к фазе сигнала центрального синхронизатора; планирование работы всех технических средств ПКУ, автоматизированная обработка и передача данных между элементами ПКУ. В автоматизированном режиме решаются практически все основные задачи управления НС и контроля навигационного поля.
5.2.1 Центр управления системой Центр управления системой соединен каналами автоматизированной и неавтоматизированной связи, а также линиями передачи данных со всеми элементами ПКУ, планирует и координирует работу всех средств ПКУ на основании принятого для ГЛОНАСС ежесуточною режима управления спутниками в рамках технологического цикла управления. При этом ЦУС собирает и обрабатывает данные для прогноза эфемерид и частотно-временных оправок, осуществляет с помощью, так называемого, баллистического центра расчет и анализ пространственных характеристик системы, анализ баллистической и структуры и расчет исходных данных для планирования работы элементов ПКУ. Информацию, необходимую для запуска спутников, расчета параметров орбитального движения, управления ими в полете, ЦУС получает от системы единого времени и эталонных частот, системы определения параметров вращения Земли, системы мониторинга гелио- и геофизизической обстановки. Центральный синхронизатор, взаимодействуя с ЦУС, формирует шкалу времени ГЛОНАСС, которая используется для синхронизации процессов и теме, например, в системе контроля фаз. Он включает в свой состав группу однородных стандартов. 5.2.2. Контрольные станции Контрольные станции (станции управления, измерения и кон ля или наземные измерительные пункты) по принятой схеме радиоконтроля орбит осуществляют сеансы траёкторных и временных измерений, необходимых для определения и прогнозирования пространственного положения спутников и расхождения их шкал времени с временной шкалой ГЛОНАСС, а также собирают телеметрическую информацию о состоянии бортовых систем спутников. С их помощью происходит закладка в бортовые ЭВМ спутников массивов служебной информации (альманах, эфемериды, частотно-временные поправки и др.), временных программ и оперативных команд для управления новыми системами. Траекторные измерения осуществляются с помощью радиолокационных станций, которые определяют запросным способом дальность до спутников и начальную скорость. Дальномерный канал характеризуется максимальной ошибкой около 2 ... 3 м. Процесс измерения дальности до спутника совмещают по времени с процессом закладки массивов служебной информации, временных программ и команд управления, со съемом телеметрических данных спутника. Для эфемеридного обеспечения с КС в ЦУС ежесуточно выдается по каждому спутнику по 10 ... 12 наборов (сеансов) измеренных текущих навигационных параметров объемом примерно 1 Кбайт каждый. В настоящее время для обеспечения работ ГЛОНАСС могут использоваться КС, рассредоточенные по всей территории России. Часть КС других элементов наземного сегмента ГЛОНАСС осталась вне территории России (в странах СНГ) и может быть использована лишь при наличии соответствующих договоренностей. Размещение сети КС выбрано с учетом существующей инфраструктуры управления НС и из условий надежного решения задач траекторных измерений для всей орбитальной группировки. Такая сеть КС обеспечивает закладку на спутники системы 1 раз/сут высокоточных эфемерид и временных поправок (возможна закладка 2 раз/сут). В случае выхода из строя одной из станций возможна ее равноценная замена другой, так как сеть КС обладает достаточной избыточностью и в наихудшей ситуации работу системы может обеспечивать ЦУС и одна станция, однако интенсивность ее работы будет очень высокой. При планировании работы КС на сутки определяются основные и резервные станции для проведения сеансов измерений с необходимой избыточностью. Контрольные станции имеют тройное резервирование по аппаратуре (один комплект рабочий, второй — в резерве, третий — профилактические работы). Коэффициент готовности средств ПКУ в сеансе измерений и закладки информации на борт спутника близок к единице. Описанная сеть КС отличается от аналогичной структуры СРНС GPS тем, что обеспечивает высокое качество управления орбитальной группировкой только с национальной территории. КС ГЛОНАСС могут использоваться для обеспечения функционирования других космических средств. 5.2.3. Эфемеридное обеспечение Эфемеридное обеспечение поддерживается комплексом технических и программных средств, выполняющих радиоконтроль орбит спутников с нескольких наземных КС, обработку результатов траекторных измерений и рас эфемеридной информации (ЭИ), передаваемой далее с помощью загрузочных станций на спутник. Высокая точность расчета эфемерид обеспечивается соответствующей точностью измерительных средств, внесением поправок на выявленные методических траекторных измерений, но и накапливаемых за недельный срок. При этом дальномерные данные, получаемые от станций слежения за спутниками, периодически калибруются, что обеспечивает высокое качество траекторных измерений в системе ГЛОНАСС. Предполагается, что такие традиционные методы управления будут использоваться до 2000 г. В дальнейшем будет осуществляться переход на новые технологии, включающие межспутниковые угломерно-дальномерные измерения, что обеспечит качественный скачок в координатно-временном обеспечении потребителей. 5.2.4. Особенности формирования эфемеридной информации в ГЛОНАСС Система ГЛОНАСС создавалась в условиях, когда уровень фундаментальных исследований в области геодезии, геодинамики и геофизики не обеспечивал требуемую точность эфемеридного обеспечения системы. В этих условиях был проведен комплекс работ по обоснованию путей решения этой проблемы через построение согласующих моделей движения спутников, параметры которых определяют в процессе решения самой задачи баллистико-навигационного обеспечения системы. Исследования показали, что необходимо отказаться от типовых остро-резонансных (например, с периодом обращения спутника равным 12 ч, как в СРНС GPS, когда период вращения Земли вокруг своей оси равен двум периодам обращения спутника) орбит спутников, так как в процессе моделирования уравнений траекторного движения спутников это повышает устойчивость их решений и ослабляет корреляции между параметрами отдельных уравнений (моделирующих, например, изменение геопотенциала, координат измерительных средств, радиационного давления). Кроме того, оказалось, что наивысшая точность баллистико-эфемеридного обеспечения системы при решении многомерной навигационной задачи с расширенным вектором состояния обеспечивается при обработке измеренных текущих навигационных параметров на интервале 8 сут. Переход от острорезонансных орбит был осуществлен путем „увеличения числа витков спутника (по сравнению с GPS) на интервале 8 сут до 16 ... 17. Число спутников в системе выбрано равным 24 с равномерным распределением по трем орбитальным плоскостям. Все спутники системы фазируются таким образом, что на больших временных интервалах они имеют один след на поверхности Земли. Это обеспечивает высокую баллистическую устойчивость системы и относительно высокую точность и простоту расчетов траекторий. Опыт эксплуатации системы показал, что при обеспечении начального периода обращения спутника с точностью не хуже 0,1 с на протяжении заданного срока активного существования спутника его положение в системе корректировать не нужно. В настоящее время в системе ГЛОНАСС используется запросная технология эфемеридного обеспечения, когда исходной информацией для расчета эфемерид служат данные измеренных текущих параметров (ИТП) спутников, поступающие в ЦУС от контрольных станций по программам межмашинного обмена через вычислительную сеть. Ежесуточно осуществляется 10 ... 12 сеансов передачи информации по каждому спутнику. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

Страницы: 1, 2
Приглашения
09.12.2013 - 16.12.2013
Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»
09.12.2013 - 16.12.2013
Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»

