 |
|
МЕНЮФестивали и конкурсы Семинары Издания О МОДНТ Приглашения Поздравляем НАУЧНЫЕ РАБОТЫ |
Реферат: Дискретизация и квантование изображенийС учетом вышеизложенного полная модель процессов формирования и записи изображения описывается соотношением g(x,y) = s [ + n ( x, y ) (4.35) где g - фактически записанное изображение, s - характеристика записывающего процесса, а п — шум. Предполагается, что п не зависит от записанного изображения. Задача повышения резкости (или восстановления) изображения заключается в определении исходного распределения интенсивности излучения объекта f (x, у) на основе записи g(x, у), содержащей шум. Формула (4.35) позволяет оценить сложность задачи восстановления изображения. Искажения исходного изображения изменяют интенсивность экспонирующего света, а в нашем распоряжении имеется только нелинейная функция от этих интенсивностей. Если избавиться от нелинейности с помощью преобразования, обратного к s, то получим s-1 { g ( x, y ) = s-1 {s [ h ( x, y ) ** f( x, y )] + n ( x, y )} , (4.36) где знак ** означает двумерную свертку. Поскольку обратная нелинейность воздействует на сумму и оператор этой нелинейности недистрибутивен по отношению к оператору сложения, то наличие шумового слагаемого означает, что 1) получить точное обратное преобразование и исходные интенсивности невозможно, 2) при преобразовании g с использованием характеристики, обратной к нелинейной характеристике системы записи, будет получена нелинейная комбинация сигнала и шума. Решения уравнения (4.36) в настоящее время не получены. На практике при восстановлении изображений делают одно из двух предположений. Первое предположение состоит в том, что в соотношении (4.36) операцию s-1 можно применить к слагаемым ïî отдельности, т.е.
s -1{ g( x, y) } что эквивалентно замене шума на новый шумовой процесс s -1{п}. При втором подходе данные обрабатываются в том виде, как они записаны, т.е. предполагается, что нелинейной функцией s можно пренебречь и
g ( x, у ) Равенства (4.37) и (4.38) были бы справедливы, если бы удовлетворялось любое из двух предположений: 1) функция s имеет слабую нелинейность и ее можно аппроксимировать линейной функцией или 2) сигнал g изменяется b малых пределах (низкоконтрастное изображение) и операторы s и s-1 близки к линейным. Графики типа изображенных на рис. 4.11 показывают, что нелинейность оператора s обычно нельзя считать слабой. При правильном выборе экспозиции диапазон изменения от черного к белому не соответствует предположению о низкой контрастности. Однако на практике изображение удается успешно восстановить в пространстве яркостей, связанном с преобразованием (4.37), или в пространстве плотностей, связанном с преобразованием (4.38), несмотря на теоретические трудности, возникающие при отбрасывании нелинейностей. Даже при беглом взгляде на соотношения (4.37) или (4.38) видно, что восстановление изображений относится к задачам фильтрации с помощью инверсной свертки (т.е. к обработке записанной информации с помощью оператора h , который является обратным по отношению к оператору двумерной свертки с функцией h). Эта задача сложна тем, что сводится к решению плохо обусловленных систем линейных уравнений [38]. При повышении резкости изображений задача усложняется за счет того, что для многих изображений аппаратная функция сингулярна, т.е. преобразование Фурье от нее имеет нули, что наблюдается, например, при дрожании съемочной камеры или плохой ее фокусировке. Поэтому при решении задач восстановления изображений значительные усилия затрачиваются на преодоление трудностей, связанных с сингулярностью [2]. Для восстановления изображений цифровыми методами необходимо, чтобы все уравнения были записаны для дискретизованных функций. Поэтому соотношение (4.35) принимает вид g ( j где знак (приближения указывает, что дискретные суммы
не являются точным представлением исходных интегралов. Аналогичные выражения
можно записать для формул (4.37) и (4.38). Интересно отметить, что соотношение
(4.39) можно рассматривать как систему уравнений относительно неизвестных
значений f. Если выполняются предположения, сделанные при выводе
соотношения (4.38), то соответствующие дискретные уравнения (где без потери
общности можно положить g ( j, k ) Формула (4.40) подсказывает, что задача восстановления изображений сводится к решению системы линейных уравнений. Это действительно так, и для подтверждения можно представить соотношение (4.40) в виде произведения матрицы на вектор. Поэтому значение цифровых методов обработки сигналов, таких, как линейная фильтрация и БПФ, состоит .в том, что они являются средством для быстрого нахождения точного или приближенного решения очень больших (с N2 переменными) систем линейных уравнений. Такой .подход очень важен для развития более совершенных методов повышения резкости изображений, но обсуждение его требует применения теории матриц в объеме, чрезмерно большом для данной книги. Подробнее связь между матричными представлениями и восстановлением изображений методом дискретного преобразования Фурье описана в работах [2, 39, 40]. 4.4.2. Основные методы повышения резкости изображений Операция дискретной свертки, фигурирующая в формуле (4.40), имеет аналог в пространстве дискретного преобразования Фурье (ДПФ). ДПФ соотношения (4.40) имеет вид G ( u, v ) = H ( u, v ) F ( u, v ) + N ( u, v ) , (4.41) где и, v = 0, 1, ..., N—1, а прописные буквы обозначают ДПФ величин, обозначенных в формуле (4.40) соответствующими строчными буквами. Так, функция H ( u, v ) = представляет собой , ДПФ от дискретизованной аппаратной функции; аналогичные соотношения имеются для G, F и N. Обычно область ненулевых значений аппаратной функции по величине гораздо меньше, чем размеры исправляемого снимка. Следовательно, N гораздо больше числа ненулевых отсчетов функции h ( j, k ) и перед преобразованием эта функция должна быть дополнена соответствующим числом нулей (необходим также надлежащий сдвиг по фазе). Как следует из теории, величину N следует выбирать достаточно большой, чтобы устранить нежелательные эффекты заворота изображения, связанные с периодичностью круговой свертки. На практике оказывается, что эти эффекты не очень существенны. Действительно, снимаемая сцена бесконечно велика по сравнению с размерами аппаратной функции и на краях кадра искаженное изображение содержит вклад объектов, расположенных вне кадра, но вносящих в кадр помехи за счет свертки с аппаратной функцией. Краевые эффекты, возникающие в процессе инверсной фильтрации изображения на основе неполной информации (о предметах, находящихся за кадром), более важны, чем завороты. Бэкстер [18] показал, как можно частично исправить эти краевые искажения. При выборе N более важно предусмотреть возможность уменьшения заворотов и эффектов усечения, связанных не с самой аппаратной функцией h( j, k ), а с функцией, обратной к ней. Простейшим способом повышения резкости изображения является обработка записи в пространственно-частотной области с помощью обратного фильтра. При этом получается оценка .восстановленного изображения Хотя это самый простой подход, при его использовании встречаются наибольшие трудности. 1. Для многих видов искажений аппаратная функция такова,. что ее ДПФ имеет нули. Например, для искажений, вызванных движением съемочной камеры в горизонтальном направлении, ДПФ аппаратной функции имеет вид H ( u, v) = где а - размер размытия, выражаемый числом отсчетов. Если искажения сильные (а достаточно велико), так что нули функции (4.44) попадают в найквистовский диапазон, то обратный фильтр является сингулярным. Аналогичная трудность возникает в случае 'искажений, вызванных расфокусировкой камеры, когда запись содержит свертку истинного изображения с формой апертуры. Для большинства стандартных форм апертуры (круглой, квадратной и т.д.) соответствующие ДПФ имеют нули; если эти нули попадают в найквистовский диапазон, то обратный фильтр оказывается сингулярным. К сожалению, обычно так и бывает. 2. Столь же неприятно то, что аппаратные функции (даже если они не приводят сингулярности) обычно являются плохо обусловленными, в частности, модуль их преобразования быстро уменьшается вблизи некоторых значений и и v (обычно в области высоких частот, поскольку искажения связаны с медленными процессами), поэтому обратный фильтр 1/H резко увеличивает влияние шумовой составляющей, входящей в формулу (4.41), что ухудшает изображение. Несмотря на все трудности, обратные фильтры удается
приманить для восстановления изображений. На рис. 4.12 приведено цифровое
изображение размером 512 Рис. 4.12 и 4.13 иллюстрируют важную мысль: обратный фильтр может работать, но для этого требуется очень большое отношение сигнал/шум и малая степень искажений. К сожалению, нет определенных правил, которыми следует руководствоваться при восстановлении изображений. Но, с другой стороны, обратная фильтрация осуществляется настолько просто, что ее можно проводить, не имея заранее гарантий на успех, и это не приведет к большим затратам, если окажется, что шум или сингулярность воспрепятствуют ее выполнению. Влиянию помех и сингулярностей менее подвержен другой метод восстановления изображений — винеровская фильтрация. Как следует из названия, такая фильтрация основана на теории оптимальных оценок, предложенной Норбертом Винером. При проектировании фильтра ставится задача найти такую линейную оценку (где L—линейный оператор), что E { [
f ( j, k) - имеет минимальную величину. Структуры устройства для получения оценок была найдена многими исследователями. Применительно к обработке изображений первым в явном виде это сделал Хелстром [41] , разработавший пространственный и частотный варианты устройства. При цифровой обработке изображений используется вариант с обработкой b частотной области. Цифровая фильтрация изображений выполняется фильтром с передаточной функцией
Hw( u, v ) = и причем звездочка означает комплексное сопряжение, а Фn и Фf - энергетические спектры шума и сигнала соответственно. Как и при обратной фильтрации, обработка производится на основе двумерных БПФ и обратное преобразование от (4.46) дает исправленное изображение. Анализируя соотношение (4.45), можно заметить следующие свойства винеровского фильтра: 1. Если шум очень мал или отсутствует, так что Фn 2. Если мощность сигнала становится малой, так что Фf На рис. 4.14, а и 4.14,6 приведены результаты восстановления изображения, полученные с помощью винеровского фильтра при таких же условиях, как на рис. 4.13, а и б. Снимки рис. 4.14, а и рис. 4.13, а похожи, что указывает на эквивалентность винеровского и обратного фильтров при малом уровне шума. Однако по качеству рис. 4.14,6 íaмнîãî превосходит рис. 4.13,6; это свидетельствует о том, что винеровский фильтр лучше подавляет шумы в областях с малым сигналом. Полосы на краях рис. 4.13 и 4.14 вызваны краевыми эффектами свертки, рассмотренными ранее, и заворотами, связанными с аппаратной функцией обратного фильтра.. Внимательное сравнение рис. 4.13,6 и 4.14,6 создает впечатление, что винеровский фильтр восстанавливает изображения с меньшим уровнем шума, чем метод обратной фильтрации, но, возможно, при этом несколько ухудшается резкость и теряются мелкие детали. Все это можно объяснить двумя причинами: 1) критерий минимума средней квадратической ошибки является слишком строгим и его можно ослабить; 2) нелинейные и адаптивные свойства человеческого зрения могут «не согласовываться» с критерием минимальной средней квадратической ошибки. В разд.4.3.3 будет рассмотрен другой способ построения восстанавливающего фильтра, в котором предъявляются меньшие требования к априорной информации, чем при винеровской фильтрации. 4.4.3. Повышение резкости изображения «вслепую» и методом уравнивания энергетических спектров Кэннон [42] предложил метод, позволяющий восстанавливать изображения лучше, чем с помощью винеровского или обратного фильтров; это так называемый метод уравнивания энергетических спектров или метод гомоморфной фильтрации. (Сначала такой фильтр был спроектирован Коулом [21] на основе теории гомоморфных систем, а затем Кэннон нашел эквивалентную форму, пользуясь методом уравнивания энергетических спектров, который и будет описан ниже.) Передаточная функция фильтра определяется из простого условия, гораздо более слабого, чем критерий минимума средней квадратической ошибки в винеровском фильтре. При проектировании фильтра отыскивается такая линейная оценка
(где L - линейный оператор), чтобы энергетический спектр оценки равнялся энергетическому спектру исходного изображения. Таким образом, условие имеет вид :
Поскольку g ( х, у ) определяется из соотношений (4.37) или (4.38), то
энергетический спектр оценки
Его можно приравнять к правой части соотношения (4.47) и в явной форме найти |L(u,v)| - модуль пространственно - частотной характеристики линейного фильтры, уравнивающего энергетические спектры (уэс). В результате характеристика фильтра будет иметь вид Hуэс( u, v ) =
| L ( u, v ) | = [ а из соотношения
определяются значения спектра восстановленного изображения. Для получения самого изображения эти значения нужно подвергнуть обратному преобразованию. Как ,и прежде, вычисления следует производить с применением БПФ. Фильтр с уравниванием энергетических спектров обладает следующими свойствами: 1. При малых шумах, когда Фn 2. При малых сигналах, когда Фf 3. В промежутке между этими экстремальными условиями коэффициент передачи фильтра больше, чем Нw , но меньше, чем Hi . Это обусловлено отсутствием множителя Н* в числителе выражения для Нw также свойствами операции извлечения квадратного корня. Можно показать, что характеристика фильтра с уравниванием энергетических спектров равна среднему геометрическому от характеристик винеровского и обратного фильтров [21]. Страницы: 1, 2, 3, 4, 5, 6, 7, 8 |
Приглашения09.12.2013 - 16.12.2013 Международный конкурс хореографического искусства в рамках Международного фестиваля искусств «РОЖДЕСТВЕНСКАЯ АНДОРРА»09.12.2013 - 16.12.2013 Международный конкурс хорового искусства в АНДОРРЕ «РОЖДЕСТВЕНСКАЯ АНДОРРА»
|
 ] +
] +
 ,
(4.40)
,
(4.40) ,
(4.42)
,
(4.42)  ,
(4.43)
,
(4.43) , (4.44)
, (4.44)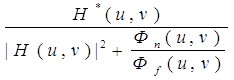 ,
(4.45)
,
(4.45) ]
]

Copyright © 2012 г.
При использовании материалов - ссылка на сайт обязательна.